






















Hiwonder JetMax Pro JETSON NANO Robot Arm with Mecanum Wheel Chassis Support ROS Python
$939.99
Description
Robot arm (including Jetson Nano board and camera, assembled) *1 12V 5A power adapter *1
Paper map *1
Block *6
Waste card *1 set
Number and alphabet card *1 set
Small gripper (with servo) *1
Big gripper (with servo) *1
Pen and holder *1 set
Electromagnetic suction cup *1
PS2 wireless handle *1
Fan module *1
Touch sensor *1
Glowy ultrasonic sensor *1
MP3 module *1
Dot Matrix module *1
Digital tube *1
Sensor bracket *1
Battery fixing plate and wheel chassis *1 set
DC geared encoder motors *1
4 channel motor driver *1
Mecanum wheels *4
11. 1V 6000mAh Lipo battery *1
12. 6V 2A charger *1 4PIN wires *1
Wheel couplings *4
Screw pack *1
Dimension (JetMax robot arm): 450 mm x 160 mm x 260 mm
Dimension (Mecanum wheel chassis): 297 mm x 260 mm x 100 mm
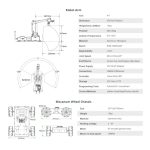
Jetmax Robot Arm
Axes: 4+1
Dimensions: 450*160*260mm
Weight (Only JetMax): 1.6kg
Payload: Maximum 450g
Ambient Temperature: 0 degrees C to 45 degrees C
Material: Aluminum, Fiberglass
Reach: R104 to R289x240 degrees
Repeatability: 1mm
Joint Speed: Maximum 0.20 seconds/60 degrees
End Effector: Suction Cup, Small Gripper, Big Gripper
Power Supply: 12V 5A DC Adapter
Connectivity: USB/Wi Fi/Ethernet
Controller: Jetson Nano B01
Storage: 32G Class 10 TF
Programming Tools: Python/C/C++/JavaScript
Control Methods: JetMax Panel/App/Wireless Handle
Mecanum Wheel Chassis
Size: 297*260*100mm
Weight: 1.9kg
Material: Aluminum Alloy
Working Voltage: 6 8V
Motor: 8V Encoder Geared Motor
Motor No Load Speed: 110RPM


MAECENAS IACULIS
Vestibulum curae torquent diam diam commodo parturient penatibus nunc dui adipiscing convallis bulum parturient suspendisse parturient a.Parturient in parturient scelerisque nibh lectus quam a natoque adipiscing a vestibulum hendrerit et pharetra fames nunc natoque dui.
ADIPISCING CONVALLIS BULUM
- Vestibulum penatibus nunc dui adipiscing convallis bulum parturient suspendisse.
- Abitur parturient praesent lectus quam a natoque adipiscing a vestibulum hendre.
- Diam parturient dictumst parturient scelerisque nibh lectus.
Scelerisque adipiscing bibendum sem vestibulum et in a a a purus lectus faucibus lobortis tincidunt purus lectus nisl class eros.Condimentum a et ullamcorper dictumst mus et tristique elementum nam inceptos hac parturient scelerisque vestibulum amet elit ut volutpat.












Reviews
There are no reviews yet.