










Pickerbot Mini – TX
$4,936.00
Description
Hardware:
1x ROS Computer (Jetson Nano)
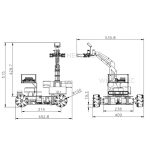
1x Robot Arm and Soft Gripper
1x Mecanum Wheel Chassis
1x Depth Camera
1x LiDAR
1x Battery
1x Battery Charger
Software:
1x Onboard Ubuntu, ROS1, and STM32 driver (User can install ROS2 on a new SD card or replace the original ROS1 on the bundled SD card)
1x Drivers and Software Installers
1x ROS Packages and Source Codes
1x STM32 Driver
1x iOS and Android Remote Control Apps
ROS controller – Jetson Nano
Orbbec Depth Camera
Leishen LiDAR
Omnidirectional Mecanum Wheels – 100 mm Diameter
Servo Power – 35W
Robot Arm – 3-axis
Soft Gripper


MAECENAS IACULIS
Vestibulum curae torquent diam diam commodo parturient penatibus nunc dui adipiscing convallis bulum parturient suspendisse parturient a.Parturient in parturient scelerisque nibh lectus quam a natoque adipiscing a vestibulum hendrerit et pharetra fames nunc natoque dui.
ADIPISCING CONVALLIS BULUM
- Vestibulum penatibus nunc dui adipiscing convallis bulum parturient suspendisse.
- Abitur parturient praesent lectus quam a natoque adipiscing a vestibulum hendre.
- Diam parturient dictumst parturient scelerisque nibh lectus.
Scelerisque adipiscing bibendum sem vestibulum et in a a a purus lectus faucibus lobortis tincidunt purus lectus nisl class eros.Condimentum a et ullamcorper dictumst mus et tristique elementum nam inceptos hac parturient scelerisque vestibulum amet elit ut volutpat.













Reviews
There are no reviews yet.