
























Yahboom Rosmaster X1 4WD Smart DIY ROS Car Kit for Jetson NANO 4GB version(Basic Version without Jetson NANO board)
$639.00
Description
1x Pendulum hanger
1x Motor chassis
4x 520 gear motor330RPM
1x Frame main control fixing plate
1x Anti collision beam
1x Pendulum suspension bracket
1x Light bar fixed
1x Radar fixing plate
1x Screwdriver
4x Parts package
4x 65mm rubber wheel
Hardware control:
1x ROS car expansion board
1x USB HUB expansion board
1x OLED screen board
1x LED light bar
1x 600OMAH 12.6V power battery and battery charger
1x Game handle and handle phone holder
Network card antenna
Several cables
1x Data cable
ROS controller:
1x 64GB system U disk (with robot system)
1x Jetson Nano accessory package
ROS accessories:
Astra Pro Plus depth camera and depth camera fixing bracket
1x YDLIDAR X3 lidar
Several wires
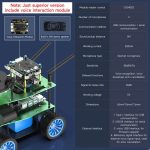
Main Control Board: Raspberry Pi 5/Jetson Nano 4GB
Operating System: Ubuntu 18.04 LTS + ROS Melodic
Programming Language: Python
Motor Scheme: 520 Metal Motor with Encoder x 4
Power Scheme: 12.6V 6000mAh 2C Lithium Battery Pack
Power Interface: T Type Power Supply Interface, DC4.0 x 1.7 Charging Interface
Remote Control Method: Mobile App, PC Computer, PS2 Wireless Handle
Communication Method: WiFi Network (LAN/AP)
Safety Protection: Short Circuit Protection, Over Current Protection
Material: Anodized Aluminum Alloy
Weight: 3200g


MAECENAS IACULIS
Vestibulum curae torquent diam diam commodo parturient penatibus nunc dui adipiscing convallis bulum parturient suspendisse parturient a.Parturient in parturient scelerisque nibh lectus quam a natoque adipiscing a vestibulum hendrerit et pharetra fames nunc natoque dui.
ADIPISCING CONVALLIS BULUM
- Vestibulum penatibus nunc dui adipiscing convallis bulum parturient suspendisse.
- Abitur parturient praesent lectus quam a natoque adipiscing a vestibulum hendre.
- Diam parturient dictumst parturient scelerisque nibh lectus.
Scelerisque adipiscing bibendum sem vestibulum et in a a a purus lectus faucibus lobortis tincidunt purus lectus nisl class eros.Condimentum a et ullamcorper dictumst mus et tristique elementum nam inceptos hac parturient scelerisque vestibulum amet elit ut volutpat.











Reviews
There are no reviews yet.