












Myactuator DC MOTOR RMD-X12-320 EtherCAT New V4 High Torque 320N.M Humanoid Robot Joint High Precision 48v DC Brushless Motor
$1,255.00
Description
Description
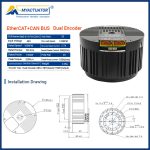
Gear Ratio:20
Input Voltage:48v
No Load Speed:125RPM
No-Load input Current:2.7A
Rated Speed:100RPM
Rated Torque:100N.M
Rated Output Power:1000W
Peak Torque:320N.M
Reviews (0)
Shipping & Delivery


MAECENAS IACULIS
Vestibulum curae torquent diam diam commodo parturient penatibus nunc dui adipiscing convallis bulum parturient suspendisse parturient a.Parturient in parturient scelerisque nibh lectus quam a natoque adipiscing a vestibulum hendrerit et pharetra fames nunc natoque dui.
ADIPISCING CONVALLIS BULUM
- Vestibulum penatibus nunc dui adipiscing convallis bulum parturient suspendisse.
- Abitur parturient praesent lectus quam a natoque adipiscing a vestibulum hendre.
- Diam parturient dictumst parturient scelerisque nibh lectus.
Scelerisque adipiscing bibendum sem vestibulum et in a a a purus lectus faucibus lobortis tincidunt purus lectus nisl class eros.Condimentum a et ullamcorper dictumst mus et tristique elementum nam inceptos hac parturient scelerisque vestibulum amet elit ut volutpat.












Reviews
There are no reviews yet.